I Worked With A Team To Design A Control System Algorithm Test Bench - Inverted Pendulum with Reaction Wheel End Effector
| ee471_final_lab_project_.pdf |
|
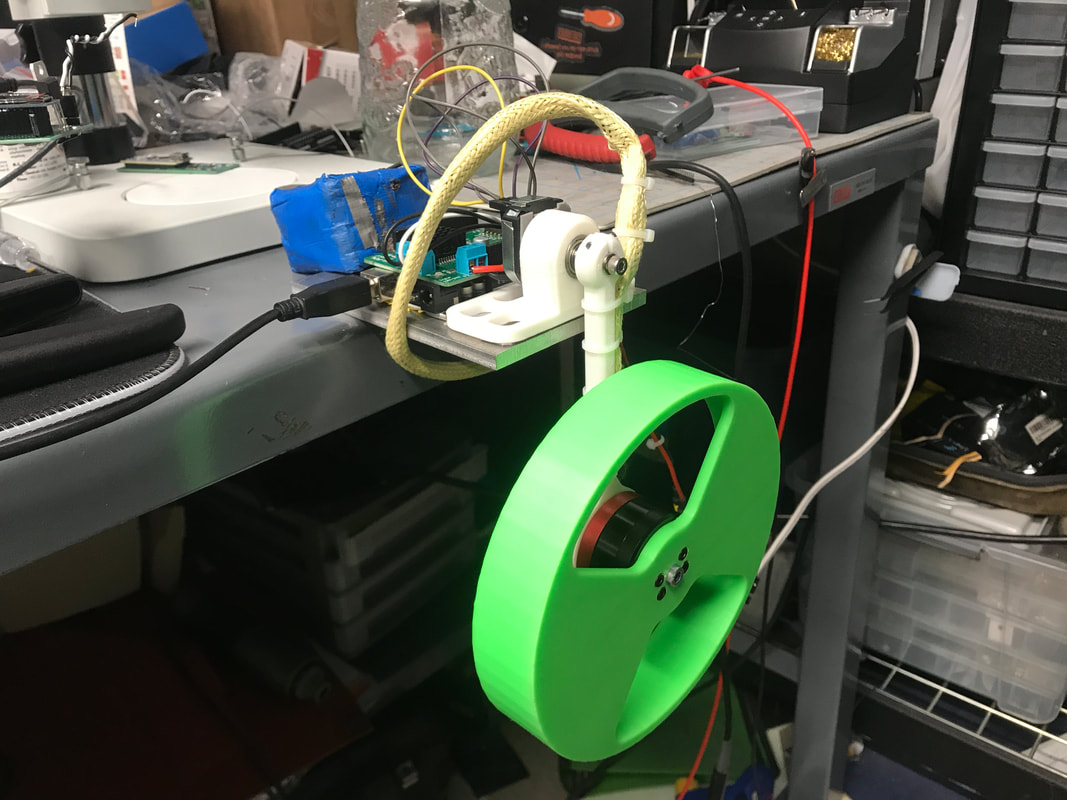
For my EE 471 Design of Control Systems Course my team and I built an inverted pendulum with a reaction wheel for the end effector.
We modeled the physics of the system with state space and then utilized a LQR controller to perform the actual stabilization. More information about the state space modeling and LQR controller can be found in the youtube video to the right. Solidworks was used to get mass estimates on the various parts as well as center of mass data. The system consists of a BLDC motor, a couple rotary encoders, 3D printed parts, and metal fasteners. For electronics, the system uses a Arduino Uno and the simpleFOC Arduino Uno Shield. The project is inspired by this git hub page, but I have modified the CAD files to fit my particular setup. The modified files can be found below |
|
| bottom_swingup.stl |
| reaction_wheel.stl |
